च्यानिर्देशिका
१. गाभा संकल्पना आणि मेट्रिक्स
२. मापन तंत्रे
३. डेटा प्रोसेसिंग आणि चुका
४. प्रक्रियेचे परिणाम
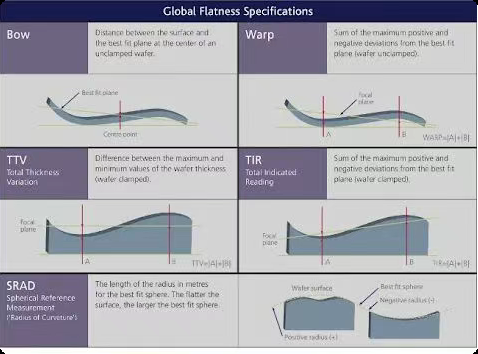
सेमीकंडक्टर मॅन्युफॅक्चरिंगमध्ये, वेफर्सची जाडी एकरूपता आणि पृष्ठभाग सपाटपणा हे प्रक्रियेच्या उत्पन्नावर परिणाम करणारे महत्त्वाचे घटक आहेत. टोटल थिकनेस व्हेरिएशन (TTV), बो (आर्क्युएट वॉरपेज), वॉर्प (ग्लोबल वॉरपेज) आणि मायक्रोवॉर्प (नॅनो-टोपोग्राफी) सारखे प्रमुख पॅरामीटर्स फोटोलिथोग्राफी फोकस, केमिकल मेकॅनिकल पॉलिशिंग (CMP) आणि थिन-फिल्म डिपॉझिशन सारख्या कोर प्रक्रियांच्या अचूकता आणि स्थिरतेवर थेट परिणाम करतात.
मुख्य संकल्पना आणि मेट्रिक्स
टीटीव्ही (एकूण जाडीतील फरक)
वार्प
वॉर्प संदर्भ समतलाच्या सापेक्ष सर्व पृष्ठभाग बिंदूंमधील कमाल शिखर ते दरी फरक मोजतो, मुक्त अवस्थेत वेफरच्या एकूण सपाटपणाचे मूल्यांकन करतो.
मोजमाप तंत्रे
१. टीटीव्ही मापन पद्धती
- दुहेरी-पृष्ठभाग प्रोफाइलमेट्री
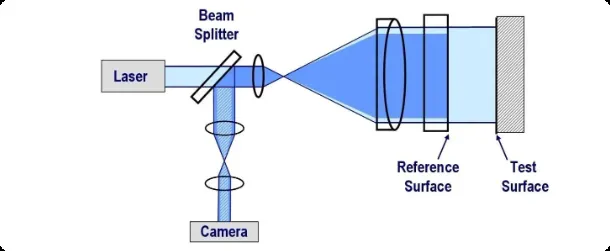
- फिझेउ इंटरफेरोमेट्री:संदर्भ समतल आणि वेफर पृष्ठभागामधील हस्तक्षेप किनारी वापरते. गुळगुळीत पृष्ठभागांसाठी योग्य परंतु मोठ्या-वक्र वेफरद्वारे मर्यादित.
- व्हाईट लाइट स्कॅनिंग इंटरफेरोमेट्री (SWLI):कमी-सुसंगत प्रकाशाच्या आवरणांद्वारे परिपूर्ण उंची मोजते. पायऱ्यांसारख्या पृष्ठभागांसाठी प्रभावी परंतु यांत्रिक स्कॅनिंग गतीमुळे मर्यादित.
- कॉन्फोकल पद्धती:पिनहोल किंवा डिस्पर्शन तत्त्वांद्वारे सब-मायक्रॉन रिझोल्यूशन मिळवा. खडबडीत किंवा अर्धपारदर्शक पृष्ठभागांसाठी आदर्श परंतु पॉइंट-बाय-पॉइंट स्कॅनिंगमुळे मंद.
- लेसर त्रिकोणीकरण:जलद प्रतिसाद परंतु पृष्ठभागावरील परावर्तकतेतील फरकांमुळे अचूकता कमी होण्याची शक्यता असते.
- ट्रान्समिशन/रिफ्लेक्शन कपलिंग
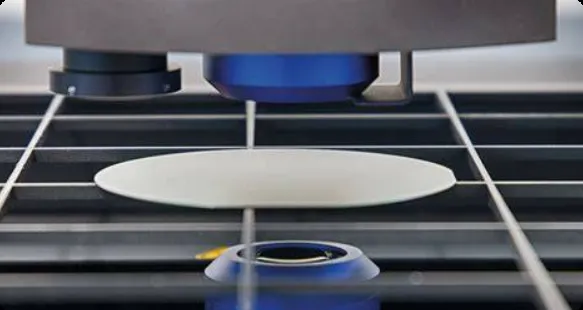
- ड्युअल-हेड कॅपेसिटन्स सेन्सर्स: दोन्ही बाजूंना सेन्सर्सचे सममितीय स्थान T = L – d₁ – d₂ (L = बेसलाइन अंतर) म्हणून जाडी मोजते. जलद परंतु भौतिक गुणधर्मांप्रती संवेदनशील.
- एलिप्सोमेट्री/स्पेक्ट्रोस्कोपिक रिफ्लेक्टोमेट्री: पातळ-फिल्म जाडीसाठी प्रकाश-पदार्थांच्या परस्परसंवादांचे विश्लेषण करते परंतु मोठ्या प्रमाणात टीटीव्हीसाठी अयोग्य आहे.
२. धनुष्य आणि तानाचे मापन
- मल्टी-प्रोब कॅपेसिटन्स अॅरे: जलद 3D पुनर्बांधणीसाठी एअर-बेअरिंग स्टेजवर पूर्ण-फील्ड उंची डेटा कॅप्चर करा.
- स्ट्रक्चर्ड लाइट प्रोजेक्शन: ऑप्टिकल शेपिंग वापरून हाय-स्पीड 3D प्रोफाइलिंग.
- कमी-एनए इंटरफेरोमेट्री: उच्च-रिझोल्यूशन पृष्ठभाग मॅपिंग परंतु कंपन-संवेदनशील.
३. मायक्रोवार्प मापन
- अवकाशीय वारंवारता विश्लेषण:
- उच्च-रिझोल्यूशन पृष्ठभागाची भूगोल मिळवा.
- 2D FFT द्वारे पॉवर स्पेक्ट्रल घनता (PSD) मोजा.
- गंभीर तरंगलांबी वेगळे करण्यासाठी बँडपास फिल्टर (उदा. ०.५-२० मिमी) लावा.
- फिल्टर केलेल्या डेटावरून RMS किंवा PV मूल्यांची गणना करा.
- व्हॅक्यूम चक सिम्युलेशन:लिथोग्राफी दरम्यान वास्तविक-जगातील क्लॅम्पिंग प्रभावांची नक्कल करा.
डेटा प्रोसेसिंग आणि त्रुटी स्रोत
प्रक्रिया कार्यप्रवाह
- टीटीव्ही:पुढील/मागील पृष्ठभाग निर्देशांक संरेखित करा, जाडीतील फरक मोजा आणि पद्धतशीर त्रुटी (उदा., थर्मल ड्रिफ्ट) वजा करा.
- च्याधनुष्य/ताणा:उंची डेटामध्ये LSQ प्लेन बसवा; धनुष्य = केंद्रबिंदू अवशेष, वर्प = शिखर ते दरी अवशेष.
- च्यामायक्रोवार्प:स्थानिक फ्रिक्वेन्सी फिल्टर करा, गणना आकडेवारी (RMS/PV).
मुख्य त्रुटींचे स्रोत
- पर्यावरणीय घटक:कंपन (इंटरफेरोमेट्रीसाठी महत्त्वाचे), हवेचा गोंधळ, थर्मल ड्रिफ्ट.
- सेन्सर मर्यादा:फेज नॉइज (इंटरफेरोमेट्री), तरंगलांबी कॅलिब्रेशन त्रुटी (कॉन्फोकल), मटेरियल-अवलंबित प्रतिसाद (कॅपॅसिटन्स).
- वेफर हाताळणी:कडा वगळण्याची चूक, शिलाईमध्ये हालचालीच्या टप्प्यातील चुका.

प्रक्रियेच्या गंभीरतेवर परिणाम
- लिथोग्राफी:स्थानिक मायक्रोवार्पमुळे डीओएफ कमी होतो, ज्यामुळे सीडी व्हेरिएशन आणि ओव्हरले एरर होतात.
- सीएमपी:सुरुवातीच्या टीटीव्ही असंतुलनामुळे पॉलिशिंगचा दाब एकसारखा नसतो.
- ताण विश्लेषण:धनुष्य/ताणा उत्क्रांती थर्मल/यांत्रिक ताण वर्तन प्रकट करते.
- पॅकेजिंग:जास्त TTV मुळे बाँडिंग इंटरफेसमध्ये पोकळी निर्माण होते.
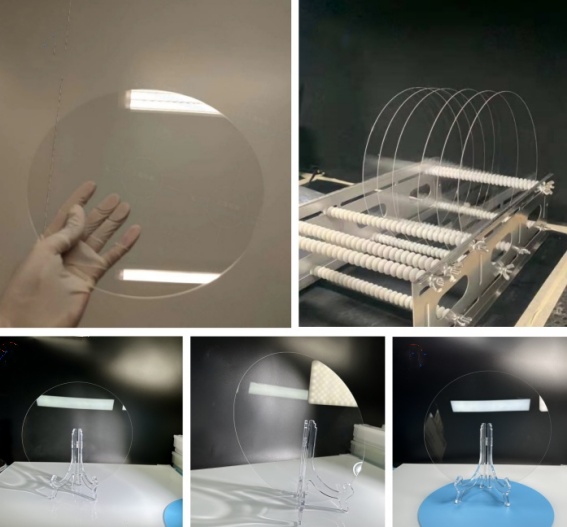
XKH चे नीलम वेफर
पोस्ट वेळ: सप्टेंबर-२८-२०२५